Примечание: Эта статья была изначально опубликована мною на Хабре: https://habr.com/ru/articles/793326
Протокол CAN сейчас широко распространён не только в автомобильной сфере, но и на предприятиях, в различных самоделках, и даже в Средствах Индивидуальной Мобильности (контроллеры VESC, например). В ноябре прошлого года я сделал для себя удобный инструмент для анализа CAN и отправки фреймов, сейчас же хочется сделать код опенсорсным (MIT License) и рассказать о самом проекте. Ссылка на код для самых нетерпеливых: https://github.com/okhsunrog/can_wizard
Поехали!
Вступление
Сперва расскажу о том, что меня подтолкнуло к его созданию. На прошлой работе, а потом и в своих проектах приходилось часто сталкиваться с анализом шины CAN, с необходимостью отправлять фреймы для отладки и тестирования. Сперва дело решилось платой Arduino Uno и стандартной платой CAN с Aliexpress, которая подключалась по SPI и содержала контроллер CAN MCP2515 и трансивер MCP2551. Прошивка была создана на коленке за 5-10 минут и была максимально простой: выводила в UART принятые CAN-фреймы и имела возможность отправки ограниченного захардкоженного числа фреймов. Парсинг данных с UART и преобразование их в фрейм было делать слишком лень. Потом, когда мне надоело для каждой новой платы/команды вносить изменения в код и заново прошивать Arduino, я задумался о варианте получше. По работе я тогда как раз сделал для Raspberry Pi несколько шильдиков, содержащих MCP2551 + SN65HVD230. Потом сделал себе такое же и дома, работал с CAN, открыв два окна в tmux: candump + cansend. Через несколько месяцев я понял, что держу на рабочем столе включенную малинку только ради тестирования CAN: у меня уже есть довольно мощный домашний сервер на x86_64 и я не видел задач, для которых мне была бы нужна ещё и малина. Было решено создать небольшое, портативное, дешевое и сердитое решение, которое обладало бы следующим функционалом: принимать и отправлять фреймы CAN, настраивать частоту, на которой работает CAN, задавать кастомные фильтры для входящих фреймов, отслеживать количество ошибок в CAN шине. Так как я в это время делал все новые проекты на esp32-c3, решено было сделать именно на нём.
Почему esp32-c3?
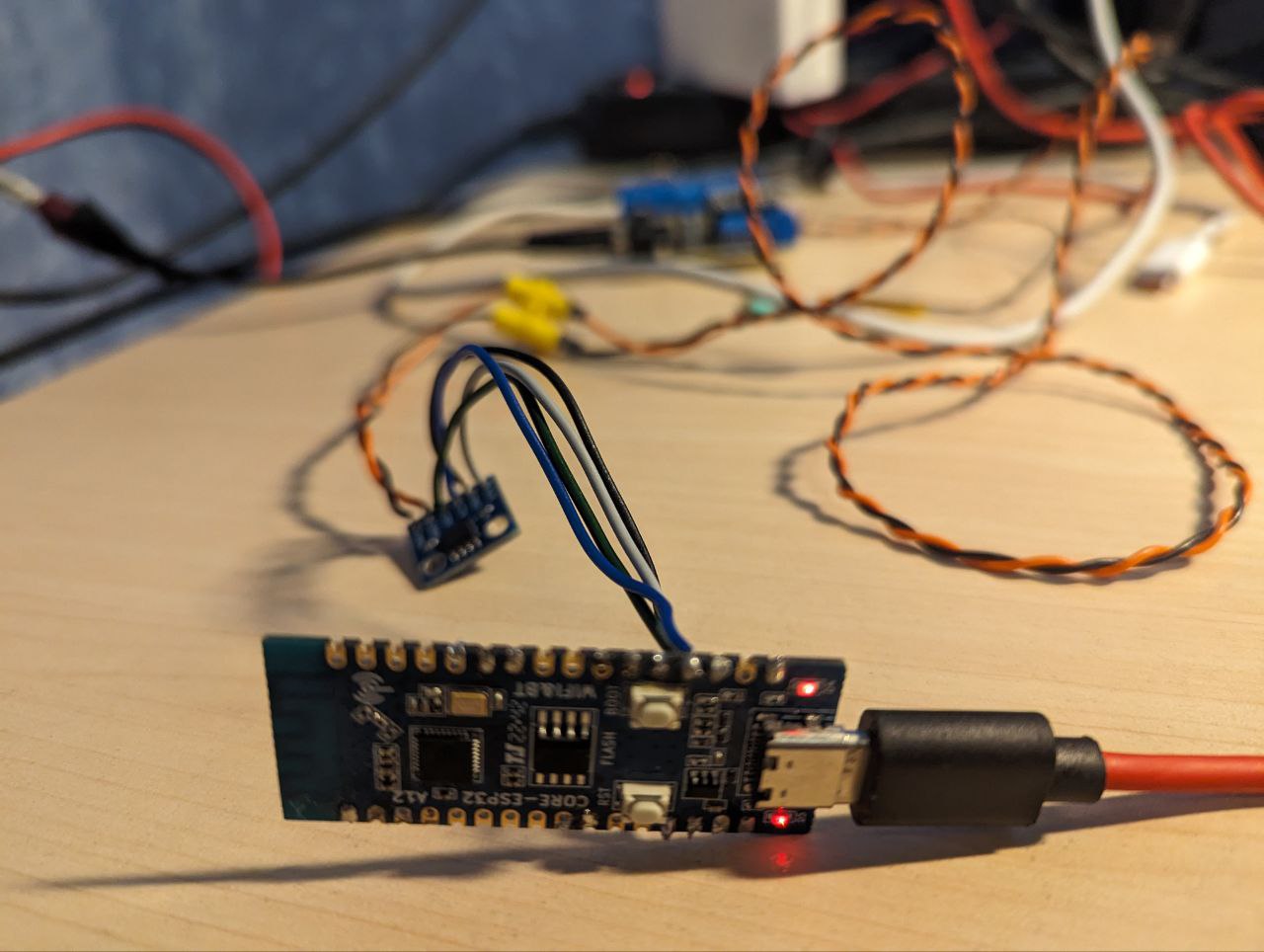
На данный момент среди микроконтроллеров мой фаворит - семейство esp32 от Espressif. Важная для нас особенность - почти во всех микроконтроллерах esp32 есть CAN-контроллер, так что нам понадобится лишь трансивер, что позволит упростить сборку и уменьшить конечную стоимость. Конечно, CAN-контроллеры есть и в некоторых чипах stm32, но в тот момент я делал все текущие проекты на esp32 и девборды на stm32 под рукой не нашлось. Конкретно esp32-c3 был выбрал из-за самой низкой стоимости, при этом его периферии хватит нам с головой, из-за наличия встроенного в чип usb-serial, ну и секция errata в даташите у него намного скромнее, чем у более олдовых esp32. По запросу "esp32-c3 board" на Али можно найти платы, которые стоят всего 180 рублей. Мне они так понравились, что я закупил целых 20 штук. В качестве микросхемы физического уровня будем использовать старую добрую SN65HVD230. На али есть модули с этой микросхемой по цене 50-90 рублей (чем дороже модуль - тем дешевле доставка). Итоговая цена девборды esp32-c3 + платы с трансивером + доставки и выходит примерно в 3 доллара.
Хорошо, а на чем будем писать софт?
В этот раз - на старом добром Си! Будем использовать официальный фреймворк esp-idf от Espressif. Очень мощная вещь с неплохой документацией, кучей примеров кода. Под капотом у неё форкнутая FreeRTOS, но так как наш чип - одноядерный, то различия с оригинальной FreeRTOS незначительны и их можно не брать во внимание. В этот раз не будем экспериментировать с поддержкой C++ в esp-idf и линковать вместе сишный и плюсовый код, тем паче оставим в стороне игрушечный Arduino. Так же не будем пока касаться новомодного Rust, поддержку которого Espressif сейчас очень активно заводит (коммиты сыпятся очень активно, планирую рассказать об этом в следующей статье). В основном стандартные библиотеки + простую реализацию односвязного списка, подключенную как компонент. Как-то в универе мы писали аналогичные штуки на Си в качестве домашней работы, но тут мне стало лень, и я просто взял с гитлаба максимально простую реализацию Linked List, чуть пофиксил и допилил под себя. Компонент для работы с CAN уже есть в составе esp-idf, причем он отлично документирован. Кстати, в Espressif называет его не CAN, а TWAI, т.к. он не поддерживает CAN FD, лишь классический CAN. Я не вижу много смысла в таком имени, но раз переименовали - значит, кому-то так проще 😃
А теперь поговорим об очень важной вещи, фактически, главной фиче этого проекта - интерактивной консоли, предоставляющей нам возможность регистрации команд, REPL окружение, редактирование строк во время ввода, мультистрочный ввод, автодополнение, подсказки, навигацию по истории команд, GNU-style аргументы для команд. Эти фичи нам предоставляет компонент esp-idf под названием Console. Если подробнее - за редактирование строк, подсказки, дополнения, историю ввода отвечает linenoise, а за парсинг аргументов отвечает argtable. За REPL окружение отвечает сам компонент Console. Естественно, библиотеки там не самой свежей версии, и сильно отредактированы для совместимости с esp-idf. Однако, этот компонент не позволил реализовать в точности то, что я хотел, из-за чего мне пришлось создать форк. В форке я синхронизировал изменения в оригинальном linenoise с версией от esp-idf, пофиксил несколько неприятных багов, а также добавил поддержку асинхронного API. Что это и для чего нужно? Мне очень хотелось, чтобы дисплей обновлялся не только во время пользовательского ввода, но и при получении нового CAN-фрейма. Причем они не должны мешать друг другу. Для этого нужно на мгновение стирать строку с промптом, выводить сообщение, а после этого рисовать промпт опять. При этом нельзя терять введенный пользователем текст команды. Также мне хотелось добавить в сам промпт полезную информацию о текущем статусе CAN. Поддержка асинхронного API появилась в linenoise после значительного рефакторинга и переписывания части функционала, поэтому мне пришлось потратить значительную часть времени, чтобы в моем форке присутствовал и новый функционал библиотеку, и патчи от esp-idf, необходимые для совместимости с esp-idf. К сожалению, на тот момент я не разобрался, как сделать что-то похожее на Serial.available() или select(2) в esp-idf (именно проверку наличия новых символов в буфере uart, без чтения). Впоследствии я нашел функцию uart_get_buffered_data_len(), но на тот момент было решено добавить семафор SemaphoreHandle_t stdout_taken_sem. Таким образом, процесс может блокироваться, ожидая пользовательского ввода, пока другой процесс выводит производный текст в консоль. Семафор же не дает linenoise выводить данные в консоль, пока мы не завершим свой вывод.
Подробнее о структуре кода
Точка входа в esp-idf - функция void app_main(void);. В ней мы сперва инициализируем uart_tx_ringbuf - дополнительный буфер, используемый для вывода наших фреймов и логов в консоль. О его назначении далее будет рассказано подробнее. Далее мы создаем процесс can_task - он отвечает за мониторинг состояния CAN периодической проверкой twai_read_alerts, восстановление CAN шины после ошибки, а так же за прием фреймов, фильтрацию их в соответствии с софтварными фильтрами и отправку в Ring Buffer uart_tx_ringbuf для дальнейшего вывода в консоль. Также в can.h объявляется SemaphoreHandle_t can_mutex используемый для того, чтобы юзер командой candown не мог остановить интерфейс CAN, пока процесс can_task заблокирован функцией twai_receive - это привело бы к панике и esp32 ушла бы в перезагрузку. Вместо этого, чтобы остановить интерфейс , мы ждем, пока twai_receive получит фрейм, или выйдет по таймауту, заданному в переменной can_task_timeout. Я установил это значение равным 200 мс, приняв его за оптимальное. Если поставить слишком большое значение - при попытки остановить интерфейс будет слишком большая задержка, а если слишком маленьким - увеличится средняя задержка между получением фрейма и выводом его в консоль.
Далее мы инициализируем файловую систему. История команд хранится на маленьком разделе fat32 в нашей flash памяти. Далее идёт инициализация консоли, где мы настраиваем параметры встроенного USB-UART интерфейса нашей esp32-c3, конфигурируем компонент Console, загружаем историю команд из файловой системы, регистрируем команды и их функции-обработчики. После запускается процесс console_task_interactive. Этот процесс создает промпт, запускает обработчик linenoise, который и обеспечивает весь интерактивный ввод. Также именно в этом процессе происходит обработка введённых пользователем команд. Из этого процесса создаётся ещё один: console_task_tx, отвечающий за вывод информации в консоль. Он получает данные из ранее упомянутого uart_tx_ringbuf и выводит их в консоль таким образом: прячет промпт с помощью linenoiseHide(), выводит данные из Ring Buffer + обновляет prompt (как я говорил, там содержится текущий статус CAN и количество ошибок), либо просто обновляет prompt, если истёк таймаут 200мс. Далее promp выводится заново с помощью linenoiseShow(). Тут используется упомянутый ранее stdout_taken_sem, чтобы linenoise не мешал нашему выводу. Для синхронизации используется и второй семафор console_taken_sem - он нужен для того, чтобы во время обработки введённой команды не было попыток вывода в консоль - попытки спрятать и показать промпт в ином случае будут работать некорректно, так как обработка введённой команды происходит после linenoiseEditStop() и перед следующим вызовом linenoiseEditStart().
Приключения с printf
Логичный вопрос, который может возникнуть - как работает вывод информации и логов в консоль? esp-idf активно использует макросы ESP_LOGI, ESP_LOGE, ESP_LOGW и т.д. для вывода логов, и её не особо тревожит, что вывод чего-то постороннего в UART может очень не понравиться linenoise (помните, как мы аккуратно пытались синхронизировать с ней вывод нашей информации с помощью семафоров?). К счастью, esp-idf достаточно гибок и предоставляет нам функцию esp_log_set_vprintf. С её помощью мы можем установить свою vprintf_like_t функцию таким образом: esp_log_set_vprintf(&vxprintf);. Реализация самой функции:
// This function will be called by the ESP log library every time ESP_LOG needs to be performed.
// @important Do NOT use the ESP_LOG* macro's in this function ELSE recursive loop and stack overflow! So use printf() instead for debug messages.
int vxprintf(const char *fmt, va_list args) {
char msg_to_send[300];
const size_t str_len = vsnprintf(msg_to_send, 299, fmt, args);
xRingbufferSend(uart_tx_ringbuf, msg_to_send, str_len + 1, pdMS_TO_TICKS(200));
return str_len;
}Отлично! Теперь макросы ESP_LOGx не печатают данные в консоль, а отправляют в наш Ring Buffer, откуда их печатает console_task_tx. Но что же делать с printf в нашем коде? Ведь он тоже может всё сломать. Не беда, вместо printf будем использовать свою функцию xprintf, использующую только что написанную нами:
int xprintf(const char *fmt, ...) {
va_list(args);
va_start(args, fmt);
return vxprintf(fmt, args);
}Также для большего удобства была реализована функция, которая может печатать текст с помощью printf/xprintf (обычный printf – для вывода из обработчика команды, когда linenoise не активен) заданным нами цветом + опционально печатать timestamp перед сообщением:
int print_w_clr_time(char *msg, char *color, bool use_printf) {
print_func pr_func;
if (use_printf) pr_func = printf;
else pr_func = xprintf;
char timestamp[20];
timestamp[0] = '\0';
if (timestamp_enabled) {
snprintf(timestamp, 19, "[%s] ", esp_log_system_timestamp());
}
if (color != NULL) {
return(pr_func("\033[0;%sm%s%s\033[0m\n", color, timestamp, msg));
} else {
return(pr_func("%s%s\n", timestamp, msg));
}
}Интерактивная консоль - это здорово. А какие команды реализованы?
команда help - подробная справка по всем командам.
cmd_system.c
free - выводит количество свободной памяти в куче.
heap - выводит минимальное количество свободной памяти в куче со времени старта esp32.
version - выводит версию esp-idf, использованную для компиляции проекта, информацию о чипе, размер flash памяти.
restart - перезагружает esp32.
tasks - выводит описание запущенных FreeRTOS процессов, в нашем случае это что-то подобное:
error active [TEC: 0][REC: 0] > tasks Task Name Status Prio HWM Task# console tsk int X 2 5964 5 IDLE R 0 1244 3 can task B 5 2916 4 console tsk tx B 2 3248 7 esp_timer S 22 3860 1log_level - позволяет установить уровень логирования
none/error/warn/info/debug/verboseдля каждого LOG_TAG отдельно, или для всех вместе.
cmd_utils.c
- timestamp - включить или выключить вывод timestamp для получаемых и отправляемых фреймов.
cmd_can.c
- cansend - тут и ежу понятно, отправляет CAN фрейм. синтаксис сделал немного похожим на синтаксис cansend из линуксового can-utils. Т.е. фрейм отправляется так:
cansend FF00#0102FE. Тип ID (extended или standart) - определяется по длине ID. Меньше 4 символов - стандартный ID, иначе - extended. - canup - Устанавливает драйвер CAN и запускает интерфейс. Принимает на вход скорость интерфейса, и, опционально, режим и два флага. Скорость может быть любой из
1000/5000/10000/12500/16000/20000/25000/50000/100000/125000/250000/500000/800000/1000000. Режим по умолчанию - normal, но есть также режимы listen_only и no_ack. Флаг -r включает автовосстановление интерфейса после ухода в bus-off из-за большого количества ошибок. Флаг -f включает ранее установленные фильтры, иначе принимаются и выводятся все фреймы. - candown - останавливает интерфейс и удаляет драйвер. Полезно, если хочется запустить CAN с другими параметрами (см. предыдущую команду), или изменить фильтры.
- canstats - выводит статистику по CAN: status, TX Err Counter, RX Err Counter, Failed transmit, Arbitration lost times, Bus-off count.
Tip: статус и RX/TX Err Counter также выводятся в prompt. - canstart - запуск CAN, когда драйвер уже установлен. Полезно при ручном восстановлении из bus-off, запускается после
canrecover. - canrecover - ручное восстановление из состояния bus-off.
- canfilter - установить фильтрацию фреймов CAN, принимает mask, code, флаг
dual filer modeв полном соответствии с документацией esp-idf, используется стандартная фильтрация фреймворка. Если вы хотите использовать этот тип фильтрации - прочитайте страничку про TWAI в доках esp-idf.
Устанавливать фильтры нужно перед выполнениемcanup. Не забудьте указать флаг-fдляcanup, чтобы она подхватила фильтры. - cansmartfilter - мудрёный фильтр, моя гордость! Комбинирует софтовую и хардварную фильтрацию, очень гибкая вещь. Давно планировал реализовать что-то такое для esp32, и вот, наконец-то сделал.
Устанавливать фильтры нужно перед выполнениемcanup. Не забудьте указать флаг-fдляcanup, чтобы она подхватила фильтры.
- cansend - тут и ежу понятно, отправляет CAN фрейм. синтаксис сделал немного похожим на синтаксис cansend из линуксового can-utils. Т.е. фрейм отправляется так:
Отдельным удовольствием было писать парсинг аргументов для всего этого чуда 😃
cansmartfilter - что за зверь?
Всё дело в том, что контроллер CAN в esp32 имеет довольно скудные возможности по фильтрации фреймов по ID - всего 1-2 паттерна, причем если нужна два паттерна с extended ID - то фильтроваться будет только часть ID. Мы можем выбирать общие биты и фильтровать по ним, но рано или поздно этого будет недостаточно - придется использовать софтовую фильтрацию. Как пример контроллера CAN с большим числом хардварных фильтров - MCP2515.
Но не будем грустить, будет решать интересную задачу! Итак, наша команда cansmartfilter может принимать от 1 до CONFIG_CAN_MAX_SMARTFILTERS_NUM фильтров. По умолчанию я установил это значение равным 10, но при желании можно поднять, главное, чтобы хватило ресурсом микроконтроллера, можно и 20 фильтров поставить, и больше. фильтры вводятся в формате code#mask. Я пока не реализовал фильтрацию фреймов со standard ID в cansmartfilter, т.к. это не используется в моих устройствах, есть только фильтрация фреймов с extended ID. Для филтрации фреймов со standart ID используйте canfilter В общем случае команда выглядит так: cansmartfilter 11223344#FFEECCBB 33123A#23BBE0 90#AB - тут мы установили 3 smart-фильтра. mask и code - uint32_t числа в hex формате. Единицы в mask означают биты, которые учитываются фильтром, нули - биты, которые игнорируются. Например, такой фильтр 0000FF00#0000FFFF будет принимать только фреймы, которые начинаются на FF00, фильтрации по остальным битам нет. Т.е. пройдет и 0029FF00, и 00ABFF00, но не пройдет 00ABFF05. Как видно - всё очень просто, и фильтров можно задавать довольно много.
Теперь о том, как оно устроено под капотом. Да-да, именно тут мне и пригодился Linked List - хранить список фильтров. Список из элементов этого типа:
typedef struct {
uint32_t filt;
uint32_t mask;
} smart_filt_element_t;В процессе парсинга аргументов команды с помощью хитрой bitwise логики выясняется, можно ли покрыть все фильтры хардварным фильтром. Можно только в 2 случаях: либо у нас всего 1 фильтр, либо множество фреймов, пропускаемое одним фильтром, является подмножеством фреймов, пропускаемых другим фильтром. Как частный случай - если фильтры совпадают. В вышеперечисленных случаях не включается софтварная фильтрация и команду cansmartfilter можно использовать как альтернативу canfilter, но с более приятным синтаксисом.
Далее поднимается интерфейс CAN командой canup -f и начинает работать фильтрация.
Общие для всех фильтров биты фильтруются с помощью хардварного фильтра, а те фреймы, которые проходят дальше - фильтруются в can_task при получении нового фрейма. Тут всё элементарно:
// somewhere in can task
const BaseType_t sem_res = xSemaphoreTake(can_mutex, 0);
if (sem_res == pdTRUE) {
while ((ret = twai_receive(&rx_msg, can_task_timeout)) == ESP_OK) {
char data_bytes_str[70];
if (adv_filters.sw_filtering) {
if (!matches_filters(&rx_msg)) continue;
}
can_msg_to_str(&rx_msg, "recv ", data_bytes_str);
print_w_clr_time(data_bytes_str, LOG_COLOR_BLUE, false);
}
xSemaphoreGive(can_mutex);
vTaskDelay(1);
}
if (sem_res != pdTRUE || ret == ESP_ERR_INVALID_STATE || ret == ESP_ERR_NOT_SUPPORTED) {
vTaskDelay(can_task_timeout);
}
bool matches_filters(const twai_message_t *msg) {
const List *tmp_cursor = adv_filters.filters;
while (tmp_cursor != NULL) {
const smart_filt_element_t* curr_filter = tmp_cursor->data;
if ((msg->identifier & curr_filter->mask) == curr_filter->filt) {
return true;
}
tmp_cursor = tmp_cursor->next;
}
return false;Собираем!
Спаять и прошить можно всего за полчаса. Ещё полчаса уйдет на то, чтобы разобраться с командами. После этого у вас будет очень удобный инструмент для отладки CAN, дешевый и портативный.
Инструкции по запуску:
Ставим тулчейн esp-idf, как указано в официальной документации
Клонируем репозиторий вместе с субмодулем:
git clone --recursive https://github.com/okhsunrog/can_wizard.gitПереходим в директорию
can_wizardidf.py set-target esp32-c3idf.py menuconfigВ меню найдите
Can_wizard Configuration --->и отредактируйте параметры по своему вкусу. Например, наверняка вам захочется изменитьCAN RX GPIO numberиCAN TX GPIO number, возможно, захочется изменитьMax number of smartfilters. Остальные параметры лучше не трогать, если точно не уверены, что они делают. Сохраните клавишей 'S' и выйдите, нажав несколько раз клавишуEsc.Припаяйте плату трансивера к плате esp32-c3, подключить нужно всего 4 пина: питание 3.3v, GND, а так же CTX и CRX согласно пинам для CAN TX и CAN RX, которые вы установили в предыдущем пункте. Внимание: на моей плате с трансивером выводы подписаны по-разному с фронтальной и с тыльной стороны платы. Если у вас та же проблема - корректные обозначения со стороны микросхемы. Кстати, на плате уже есть терминирующий резистор на 120 Ом. Если он вам не нужен - просто выпаяйте, а ещё лучше - сдвиньте, оставив припаянным один контакт. Так вы легко вернёте его на место при необходимости.
Подключите usb к esp32-c3 и выполните в терминале
idf.py flash monitorВаш терминал должен поддерживать Escape-последовательности ANSI. Точно работают GNU screen, minicom, и esp-idf-monitor
если в esp-idf-monitor вы видите неприятные мигания промпта, попробуйте другую serial console. Например,
minicom --color=on -b 115200 -D /dev/ttyACM0
Демонстрация
https://www.youtube.com/watch?v=ajKFa0b113o
Это моя первая статья, прошу не судить слишком строго, адекватной критике и советам буду очень рад! В свою очередь готов ответить на любые вопросы по проекту 😃